Find General Solution of Pde With Bon Condition in Maple
Open access peer-reviewed chapter
Solution of Differential Equations with Applications to Engineering Problems
By Cheng Yung Ming
Submitted: May 6th 2016 Reviewed: January 19th 2017 Published: March 15th 2017
DOI: 10.5772/67539
Abstract
Over the last hundred years, many techniques have been developed for the solution of ordinary differential equations and partial differential equations. While quite a major portion of the techniques is only useful for academic purposes, there are some which are important in the solution of real problems arising from science and engineering. In this chapter, only very limited techniques for solving ordinary differential and partial differential equations are discussed, as it is impossible to cover all the available techniques even in a book form. The readers are then suggested to pursue further studies on this issue if necessary. After that, the readers are introduced to two major numerical methods commonly used by the engineers for the solution of real engineering problems.
Keywords
- differential equations
- analytical solution
- numerical solution
1. Introduction
1.1. Classification of ordinary and partial equations
To begin with, a differential equation can be classified as an ordinary or partial differential equation which depends on whether only ordinary derivatives are involved or partial derivatives are involved. The differential equation can also be classified as linear or nonlinear. A differential equation is termed as linear if it exclusively involves linear terms (that is, terms to the power 1) of
E1
"Non-linear" differential equation can generally be further classified as
-
Truly nonlinear in the sense thatF is nonlinear in the derivative terms.E2
-
Quasi-linear 1st PDE if nonlinearity inF only involvesu but not its derivativesE3
-
Quasi-linear 2nd PDE if nonlinearity inF only involvesu and its first derivative but not its second-order derivativesE4
1.2. Typical differential equations in engineering problems
Many engineering problems are governed by different types of partial differential equations, and some of the more important types are given below.
-
Tricomi equation : -
Laplace equation (or variants): -
Poisson's equation: -
Helmholtz equation: -
Plate bending: -
Wave equation (1D-3D) : -
Fourier equation:
There are many methods of solutions for different types of differential equations, but most of these methods are not commonly used for practical problems. In this chapter, the most important and basic methods for solving ordinary and partial differential equations will be discussed, which will then be followed by numerical methods such as finite difference and finite element methods (FEMs). For other numerical methods such as boundary element method, they are less commonly adopted by the engineers; hence, these methods will not be discussed in this chapter.
1.3. Separable differential equations
For equations which can be expressed in separable form as shown below, the solution can be obtained easily as
E5
E6
E7
Example:
E9000
Example:
Since this is a separable function, the problem can be solved as
E9008
Based on the boundary condition,
This quadratic equation in
E9001
Since the second solution does not satisfy the boundary condition, it will not be accepted; hence, the solution to this differential equation is obtained.
1.4. Variation of parameters
For the following equation form, it is possible to solve it by variations of parameters.
Put
E9
Example:
E9003
This equation is now expressed as
E9002
For
Solving the homogeneous part of the ODE
E9005
Look for solution
E9006
Comparison gives
Integration of this equation gives
General solution is hence given by
The Bernoulli equation is an important equation type which can be solved in a similar way by variation of parameters. Consider the following form of equation
E12
The non-linear ODE now becomes linear ODE. It can be solved by formula
E15
Back substitution of
1.5. Homogeneous equations
For equation of the following type, where all the coefficients are constant, it can be evaluated according to different conditions.
E17
E18
E19
By change of variables as
The resulting non-linear ODE is now separable and can be solved.
Set
E21
Apply change of variables
E22
E23
The original ODE will now become
Example:
Solve for
Change of variables
Then,
Use a change of variable
E9007
There are various tricks to solve the differential equations, like integration factors and other techniques. A very good coverage has been given by Polyanin and Nazaikinskii [29] and will not be repeated here. The purpose of this section is just for illustration that various tricks have been developed for the solution of simple differential equations in homogeneous medium, that is, the coefficients are constants inside a continuous solution domain. The readers are also suggested to read the works of Greenberg [14], Soare et al. [34], Nagle et al. [28], Polyanin et al. [30], Bronson and Costa [4], Holzner [18], and many other published books. There are many elegant tricks that have been developed for the solution of different forms of differential equations, but only very few techniques are actually used for the solution of real life problems.
1.6. Partial differential equations
In many engineering or science problems, such as heat transfer, elasticity, quantum mechanics, water flow and others, the problems are governed by partial differential equations. By nature, this type of problem is much more complicated than the previous ordinary differential equations. There are several major methods for the solution of PDE, including separation of variables, method of characteristic, integral transform, superposition principle, change of variables, Lie group method, semianalytical methods as well as various numerical methods. Although the existence and uniqueness of solutions for ordinary differential equation is well established with the Picard-Lindelöf theorem, but that is not the case for many partial differential equations. In fact, analytical solutions are not available for many partial differential equations, which is a well-known fact, particularly when the solution domain is nonregular or homogeneous, or the material properties change with the solution steps.
1.6.1. Classification of second-order PDE
Refer to the following general second-order partial differential equation:
E24
To begin with, let us consider a review of conic curves (ellipse, parabola and hyperbola)
The conic curve can be classified with the following criterion.
E26
Following the conic curves, the general partial differential is also classified according to similar criterion as
E27
This classification was proposed by Du Bois-Reymond [41] in 1839. In this section, only some of the more common techniques are discussed, and the readers are suggested to read the works of Hillen et al. [16], Salsa [33], Polyanin and Zaitsev [31], Bertanz [2], Haberman [15] and many other published texts.
1.7. Parabolic type: heat conduction/soil consolidation/diffuse equation
The following equation form is commonly found in many engineering applications.
E28
Initial condition:
Boundary condition:
Initial excess pore pressure
E29
Drained boundary
E30
Assuming variable
E32
A PDE now becomes two ODE which can be solved readily. Based on the boundary condition
E33
This is an eigenvalue problem which has solution only for certain
Hence the eigenfunctions are expressed as
E35
For the time-dependent function
E37
hence
E38
The Fourier series expansion in
E40
Initial condition is given as
E41
E8000
Solution of the soil consolidation equation is hence given by
E42
E43
1.8. One-dimensional wave equation
One-dimensional (1D) wave equation appears in many physical and engineering problems. For example, a vibrating string or pile driving process is given by this type of differential equation. This problem is also commonly solved by the method of separation of variables
E44
Consider
E45
The partial differential equation will then be given by two equivalent ODEs.
E46
E48
For the time-dependent function
E51
Since
Therefore,
Fundamental solution is given by
E52
The general solution is then given by
E53
Applying the boundary condition
E54
The final solution is then given by
E55
E56
1.9. Laplace equation
Laplace equation forms an important governing condition for many types of problems. Some of the more common forms are given by
-
three-dimensional Laplace equation -
two-dimensional heat conduction -
two-dimensional seepage problem
There are two major types of boundary conditions to this problem:
-
Dirichlet problem: boundary conditions prescribed asu -
Neumann problem: normal derivativeu x oru y are usually prescribed on the boundary for many mathematical problems. This case can be solved by the use of complex analysis or series method for which many analytical solutions are available in the literature. In many anisotropic seepage problems, however, the normal of a derived quantity at any arbitrary direction (seepage flow normal to an impermeable surface) is 0 instead ofu x oru y being zero. For such cases, it is very difficult to obtain the analytical solution if the solution domain is nonhomogeneous, and the use of numerical method such as the finite element method appears to be indispensable.
Consider the given Laplace equation, using separation of variables for the analysis.
E57
Using separation of variables,
E58
E60
E61
E62
E63
Since
E65
E66
Based on the Fourier expansion as given by
E67
E9009
1.10. Introduction to numerical methods
In general, analytical solutions are not available for most of the practical differential equations, as regular solution domain and homogeneous conditions may not be present for practical problems. Moreover, the solution domain may be indeterminate (free surface seepage flow), the displacement is large so that the solution may deform under motion, or in an extreme case part of the material may tear off from the main body with continuous formation and removal of contacts. Many engineering problems fall into such category by nature, and the use of numerical methods will be necessary. Currently, there are several major numerical methods commonly used by the engineers: finite difference method, finite element method, boundary element method and distinct element. There are also other less common numerical methods available for practical problems, and many researchers also try to combine two or even more fundamental numerical methods so as to achieve greater efficiency in the analysis. In general, the solution domain is discretized into series of subdomains with many degrees of freedom. The number of variables or degrees of freedom may even exceed millions for large-scale problems, and sometimes very special material properties are encountered so that the system is highly sensitive to the method of discretization and the method of solution. Similar to the ODE and PDE, it is impossible to discuss the details of all the numerical methods and the author choose to discuss the finite element method due to the wide acceptance of the method and this method is more suitable for general complicated methods.
Except for some simple problems with regular geometry and loading, it is very difficult to solve most of the boundary value problems with the yield of analytical solutions. Towards this, the use of numerical method seems indispensable, and the finite element is one of the most popular methods used by the engineers [32, 38]. There are two fundamental approaches to FEM, which are the weighted residual method (WRM) and variational principle, but there are also other less popular principles which may be more effective under certain special cases. In finite element analysis of an elastic problem, solution is obtained from the weak form of the equivalent integration for the differential equations by WRM as an approximation. Alternatively, different approximate approaches (e.g. collocation method, least square method and Galerkin method) for solving differential equations can be obtained by choosing different weights based on the WRM and the Galerkin method appears to be the most popular approach in general.
Specifically, in elasticity for instance, the principle of virtual work (including both principle of virtual displacement and virtual stress) is considered to be the weak form of the equivalent integration for the governing equilibrium equations. Furthermore, the aforementioned weak form of equivalent integration on the basis of the Galerkin method can also be evolved to a variation of a functional if the differential equations have some specific properties such as linearity and selfadjointness. Principles of minimum potential energy and complementary energy are two variational approaches equivalent to the fundamental equations of elasticity.
Since displacement is usually the basic unknown quantity in FEM, only the principle of virtual displacement and minimum potential energy will be introduced in the following section. In this case, the FEM introduced herein is also called displacement finite element method (DFEM). There are other ways to form the basis of FEM with advantages in some cases, but these approaches are less general and will not be discussed here.
1.11. Principle of virtual displacement
The principle of virtual displacement is the weak form of the equivalent integration for equilibrium equations and force boundary conditions. Given the equilibrium equations and force boundary conditions in index notation,
E68
E69
In WRM, without loss of generality, the variation of true displacement
E70
The weak form of Eq. (70) is given as
E71
It can be seen clearly from Eq. (71) that the first item in the volume integral indicates the work done by the stresses under the virtual strain (i.e. internal virtual work), while the remaining items indicate the work done by the body force and surface force under the virtual displacement (i.e. external virtual work). In other words, the summation of the internal and external virtual works is equal to 0, which is called the principle of virtual displacement. Under this case, we can conclude that a force system will satisfy the equilibrium equations if the summation of the work done by it under any virtual displacement and strain is equal to 0.
1.12. Principle of minimum potential energy (PMPE)
Based on Eq. (71), we can deduce that
E72
Due to the symmetry of the constitutive matrix
E73
where
E74
Eq. (72) is further simplified to
E76
Eq. (75) shows that, among all the potential displacements, the total potential energy of system will take stationary value at the real displacement, and it can be further verified that this stationary value is exactly the minimum value which is the principle of minimum potential energy.
1.13. General expressions and implementation procedure of FEM
The solution of a general continuum problem by FEM always follows an orderly step-by-step process which is easy to be programmed and used by the engineers. For illustration, a three-node triangular element for plane problems is taken as an example to illustrate the general expressions and implementation procedures of FEM.
1.13.1. Discretization of domain
The first step in the finite element method is to divide the structure or solution region into subdivisions or elements. Hence, the structure is to be modelled with suitable finite elements. In general, the number, type, size, and arrangement of the elements are critical towards good performance of the numerical analysis. A typical discretization with three-node triangular element is shown schematically in Figure 1 .

Figure 1.
Discretization of a two-dimensional domain with three-node triangular element.
Mesh generation can be a difficult process for a general irregular domain. If only triangular element is to be generated, this is a relatively simple work, and many commercial programs can perform well in this respect. There are also some public domain codes (EasyMesh or Triangle written in C) which are sufficient for normal purposes. For quadrilateral or higher elements, mesh generation is not that simple, and it is preferable to rely on the use of commercial programs for such purposes.
1.13.2. Interpolation or displacement model
As can be seen from Figure 1(b) , the nodal number of a typical three-node triangular element is coded in anticlockwise order (i.e. in the order of
Totally, each element has six nodal displacements, i.e. six DOFs. Putting all the displacements in a column vector, we can obtain the element nodal displacement column matrix as
E78
In FEM, a nodal displacement is chosen as the basic unknowns, so interpolation at any arbitrary point is based on the three nodal displacements of each element, which is called a displacement mode. For a three-node triangular element, linear polynomial is utilized, and the element displacement in both
Obviously, displacements of all the three nodes should satisfy Eqs. (79) and (80). By substituting the six nodal displacement components into these equations, it is easy to obtain another form of displacement mode as
where
E83
In Eq. (81),
E84
where
E85
where
E86
Substitute Eq. (85) by the stress-strain relation,
E87
where
E88
1.13.3. Stiffness equilibrium equation (SEE) of FEM derived from PMPE
For elastic plane problems, the total potential energy
E89
where
E90
Eq. (90) can be viewed as
E91
where
E92
Given
Eq. (92) is further simplified as
where
For PMPE, the variation of
which finally comes to the SEE of FEM as
From Eq. (93), we know that the global stiffness matrix and the global load matrix are the assemblage of the element stiffness matrices and equivalent element nodal load matrices, respectively. Specifically, in order to solve Eq. (93), element stiffness matrix, element equivalent nodal load vector, global stiffness matrices and global nodal load vector are all determined together with some given displacement boundary conditions. Without the provision of adequate boundary condition, the system is singular as rigid body motion will produce no stress in the system and such mode will be present in the SEE.
1.13.4. Derivation of element stiffness matrices (ESM)
For a three-node triangular element, the element strain matrix
E96
of which the submatrix
E97
It should be noted that for a higher order triangular element (e.g. six-node triangular element) or quadrilateral element for which higher order terms are involved, the strain matrix
1.13.5. Assembling of ESMs and ENLMs
For an FEM process, we need to solve Eq. (95) which is the global equilibrium equation. Most of the elements in the matrix
where
In conclusion, the properties of the global stiffness matrix can be summarized as: symmetric, banded distribution, singularity and sparsity. Among all the properties, singularity will vanish by introducing appropriate boundary conditions to Eq. (95) to eliminate the rigid body motion. Also, other properties like banded distribution should be fully taken into consideration to reduce the computational memory and enhance the computation efficiency.
1.13.6. Isoparametric element and numerical integration
Most of the engineering structure is not regular in shape, and some of them even have very complicated boundary shapes. Although the use of triangular element can always fit a complicated boundary, the accuracy of this element is low in general. To cope with the irregular boundary shape with a higher accuracy in analysis, one of the most common approaches is the use of higher-order element, and the isoparametric formulation is the most commonly used at present. Consider an arbitrary four-node quadrilateral element as an example which is schematically shown in Figure 2 . If we can find the transformation from Figure 2(a) to (b), then it will become easier to carry numerical integration with complicated shapes for an arbitrary element. In Figure 2(a), we define the Cartesian coordinate system, while in Figure 2(b) , we define the local coordinate system (or natural coordinate system) within a specific domain (i.e.
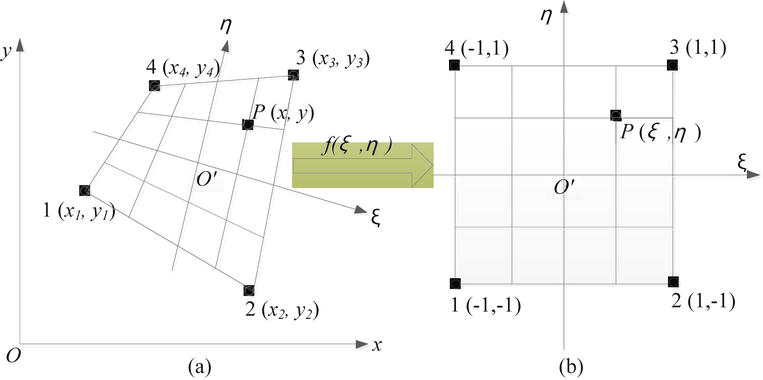
Figure 2.
Isoparametric transition.
which can be further modified by the interpolation function at nodes in the local coordinate system as follows:
E100
where
E101
Using the same interpolation functions, the element displacement model can be written as
E102
where
E103
As mentioned before, during the derivation of the element stiffness matrix and the equivalent load vector, the derivative of the shape function and the integration in element surface or volume in the Cartesian coordinate system are required. Since the shape functions adopted herein are expressed in natural coordinates, therefore, derivative and integration transformation relationships are essential when isoparametric element is used.
1.13.7. Derivative and integral transformation
According to the law of partial differential,
E104
or in matrix form
E105
Inverse of Eq. (105) gives
E106
where
E107
For an infinitely small element, the area under the Cartesian coordinate system and the natural coordinate system are related by
where
E109
For solving the integral equation, usually the Gaussian integration method is employed. In practice, both two and three integration points along each direction of integration are commonly used. Since the discretized system is usually overstiff, it is commonly observed that the use of two integration points along each direction of integration will slightly reduce the stiffness of the matrix and give better results as compared with the use of three integration points. The use of exact integration is possible for some elements, but such approaches are usually tedious and are seldom adopted. The advantage in using the exact integration is that the integration is not affected by the shape of the element while the transformation as shown in Eq. (109) may be affected if the poor shape of the element is poor. The author has developed many finite element programs for teaching and research purposes which can be obtained at ceymchen@polyu.edu.hk. The programs available include plane stress/strain problem, thin/thick plate bending problem, consolidation in 1D and 2D (Biot), seepage problem, slope stability problem, pile foundation problems and others.
1.14. Distinct element method
In practical applications, a limit equilibrium method based on the method of slices or method of columns and strength reduction method based on the finite element method or finite difference method are used for many types of stability problems. These two major analysis methods take the advantage that the
The most commonly used numerical methods for continuous systems are the FDM, the FEM and the boundary element method (BEM). The basic assumption adopted in these numerical methods is that the materials concerned are continuous throughout the physical processes. This assumption of continuity requires that, at all points in a problem domain, the material cannot be torn open or broken into pieces. All material points originally in the neighbourhood of a certain point in the problem domain remain in the same neighbourhood throughout the whole physical process. Some special algorithms have been developed to deal with material fractures in continuum mechanics-based methods, such as the special joint elements by Goodman [13] and the displacement discontinuity technique in BEM by Crouch and Starfield [5]. However, these methods can only be applied with limitations [21]:
-
large-scale slip and opening of fracture elements are prevented in order to maintain the macroscopic material continuity;
-
the amount of fracture elements must be kept to relatively small so that the global stiffness matrix can be maintained well-posed, without causing severe numerical instabilities; and
-
complete detachment and rotation of elements or groups of elements as a consequence of deformation are either not allowed or treated with special algorithms.
Before a slope starts to collapse, the factor of safety serves as an important index in both the LEM and SRM to assess the stability of the slope. The movement and growth after failure have launched which is also important in many cases that cannot be simulated on the continuum model, and this should be analyzed by the distinct element method (DEM).
In continuum description of soil material, the well-established macro-constitutive equations whose parameters can be measured experimentally are used. On the other hand, a discrete element approach will consider that the material is composed of distinct grains or particles that interact with each other. The commonly used distinct element method is an explicit method based on the finite difference principles which is originated in the early 1970s by a landmark work on the progressive movements of rock masses as 2D rigid block assemblages [6]. Later, the works by Cundall are developed to the early versions of the UDEC and 3DEC codes [9, 10, 12]. The method has also been developed for simulating the mechanical behaviour of granular materials [8], with a typical early code BALL [7], which later evolved into the codes of the PFC group for 2D and 3D problems of particle systems (Itasca, 1995). Through continuous developments and extensive applications over the last three decades, there has accumulated a great body of knowledge and a rich field of literature about the distinct element method. The main trend in the development and application of the method in rock engineering is represented by the history and results of the code groups UDEC/3DEC. Currently, there are many open source (Oval, LIGGGHTS, ESyS, Yade, ppohDEM, Lammps) as well as commercial DEM programs, but in general, this method is still limited to basic research instead of practical application as there are many limitations which include: (1) difficult to define and determine the microparameters; (2) there are still many drawbacks in the use of matching with the macro response to determine the microparameters; (3) not easy to set up a computer model; (4) not easy to include structural element or water pressure; (5) extremely time consuming to perform an analysis; and (6) postprocessing is not easy or trivial. It should also be noted that DEM can be formulated by an energy-based implicit integration scheme which is the discontinuous deformation analysis (DDA) method. This method is similar in many respect to the force-based explicit integration scheme as mentioned previously.
In DEM, the packing of granular material can be defined from statistical distributions of grain size and porosity, and the particles are assigned normal and shear stiffness and friction coefficients in the contact relation. Two types of bonds can be represented either individually or simultaneously; these bonds are referred to the contact and parallel bonds, respectively (Itasca, 1995). Although the individual particles are solid, these particles are only partially connected at the contact points which will change at different time step. Under low normal stresses, the strength of the tangential bonds of most granular materials will be weak and the material may flow like a fluid under very small shear stresses. Therefore, the behaviour of granular material in motion can be studied as a fluid-mechanical phenomenon of particle flow where individual particles may be treated as "molecules" of the flowing granular material. In many particle models for geological materials in practice, the number of particles contained in a typical domain of interest will be very large, similar to the large numbers of molecules.
One of the primary objectives of the particle model is the establishment of the relations between microscopic and macroscopic variables/parameters of the particle systems, mainly through micromechanical constitutive relations at the contacts. Compared with a continuum, particles have an additional degree of freedom of rotation which enables them to transmit couple stresses, besides forces through their translational degrees of freedom. At certain moment, the positions and velocities of the particles can be obtained by translational and rotational movement equations and any special physical phenomenon can be traced back from every single particle interactions. Therefore, it is possible for DEM to analyze large deformation problems and a flow process which will occur after slope failure has initiated. The main limitation of DEM is that there is great difficulty in relating the microscopic and macroscopic variables/parameters; hence, DEM is mainly tailored towards qualitative instead of quantitative analysis.
DEM runs according to a time-difference scheme in which calculation includes the repeated application of the law of motion to each particle, a force-displacement law to each contact, and a contact updating scheme. Generally, there are two types of contact in the program which are the ball-wall contact and the ball-ball contact. In each cycle, the set of contacts is updated from the known particles and known wall positions. Force-displacement law is firstly applied on each contact, and new contact force is then calculated according to the relative motion and constitutive relation. Law of motion is then applied to each particle to update the velocity, the direction of travel based on the resultant force, and the moment and contact acting on the particles. Although every particle is assumed as a rigid material, the behaviour of the contacts is characterized using a soft contact approach in which finite normal stiffness is taken to represent the stiffness which exists at the contact. The soft contact approach allows small overlap between the particles which can be easily observed. Stress on particles is then determined from this overlapping through the particle interface.
1.15. General formulation of DEM
The PFC runs according to a time-difference scheme in which calculation includes the repeated application of the law of motion to each particle, a force-displacement law to each contact, and a contact updating a wall position. Generally, there are two types of contact exist in the program which are ball-to-wall contact and ball-to-ball contact. In each cycle, the set of contacts is updated from the known particle and the known wall position. The force-displacement law is first applied on each contact. New contact force is calculated and replaces the old contact force. The force calculations are based on preset parameters such as normal stiffness, density, and friction. Next, a law of motion is applied to each particle to update its velocity, direction of travel based on the resultant force, moment and contact acting on particle. The force-displacement law is then applied to continue the circulation.
1.16. The force-displacement law
The force-displacement law is described for both the ball-ball and ball-wall contacts. The contact arises from contact occurring at a point. For the ball-ball contact, the normal vector is directed along the line between the ball centres. For the ball-wall contact, the normal vector is directed along the line defining the shortest distance between the ball centre and the wall. The contact force vector
E110
The force acting on particle
E111
where
E112
where
where
1.17. Law of motion
The motion of the particle is determined by the resultant force and moment acting on it. The motion induced by resultant force is called translational motion. The motion induced by resulting moment is rotational motion. The equations of motion are written in vector form as follows:
-
(Translational motion)
-
(Rotational motion)
where
In a typical DEM simulation, if there is no yield by contact separation or frictional sliding, the particles will vibrate constantly and the equilibrium is difficult to be achieved. To avoid this phenomenon which is physically incorrect, numerical or artificial damping is usually adopted in many DEM codes, and the two most common approaches to damping are the mass damping and non-viscous damping. For mass damping, the amount of damping that each particle "feels" is proportional to its mass, and the proportionality constant depends on the eigenvalues of the stiffness matrix. This damping is usually applied equally to all the nodes. As this form of damping introduces body forces, which may not be appropriate in flowing regions, it may influence the mode of failure. Alternatively, Cundall [11] proposed an alternative method where the damping force at each node is proportional to the magnitude of the out-of-balance-force, with a sign to ensure that the vibrational modes are damped rather than the steady motion. This form of damping has the advantage that only accelerating motion is damped and no erroneous damping forces will arise from steady-state motion. The damping constant is also non-dimensional and the damping is frequency independent. As suggested by Itasca [20], an advantage of this approach is that it is similar to the hysteretic damping, as the energy loss per cycle is independent of the rate at which the cycle is executed. While damping is one way to overcome the non-physical nature of the contact constitutive models in DEM simulations, it is quite difficult to select an appropriate and physically meaningful value for the damping. For many DEM simulations, particles are moving around each other and the dominant form of energy dissipation is for frictional sliding and contact breakages. The choice of damping may affect the results of computations. Currently, most of the DEM codes allow the use of automatic damping or manually prescribed the damping if necessary.
To capture the inherent non-linearity behaviour of the problem (with generation and removal of contacts, non-linear contact response and stress-strain behaviour and others), the displacement and contact forces in a given time step must be small enough so that in a single time step, the disturbances cannot propagate from a particle further than its nearest neighbours. For most of the DEM programs, this can be achieved automatically and the default setting is usually good enough for normal cases. It is, however, sometimes necessary to manually adjust the time step in some special cases when the input parameters are unreasonably high or low. Most of the DEM codes use the central difference time integration algorithm which is a second-order scheme in time step.
1.18. Measuring logic
If the local results in DEM are analyzed, it is found that there will be large fluctuations with respect to both locations and time. Such results are not surprising, as the results are highly sensitive to the interaction between particles and hence the time step under which the results are monitored. It can be viewed that such local results can be meaningless unless the results are monitored over a long time span or region. A number of quantities in a DEM model are defined with respect to a specified measurement circle. These quantities include coordinate number, porosity, sliding fraction, stress and strain rate. The coordination number and stress are defined as the average number of contacts per particle. Only particles with centroids that are contained within the measurement circle are considered in computation. In order to account for the additional area of particles that is being neglected, a corrector factor based on the porosity is applied to the computed value of stress.
Since measurement circle is used, stress in particle is described as the two in-plane force acting on each particle per volume of particle. Average stress is defined as the total stress in particle divided by the volume of measurement circle. Thus, shape of particle is regardless of the average stress measurement because the reported stress is easily scaled by volume unity. The reported stress is interpreted as the stress per volume of measurement circle.
1.19. Discussion and conclusion
There are also various publications on the numerical solutions of differential equations, and the readers are suggested to the works of Lee and Schiesser [24], Jovanoic and Suli [22], Veiga et al. [37], Sewell [35], Morton and Mayers [27], Logg et al. [25], Holmes [17], Lui [26], Lapids and Pinder [23] and Iserles [19]. It is impossible for the author to cover every available analytical or numerical method; hence, the author has chosen some methods that are actually used for teaching and research. The readers are strongly encouraged to consult the numerous resources available in various books and publications. There are still new developments available for the solutions of specific differential equations in large-scale problems, and this is also the current trend in the development of differential equation solution.
Due to the importance of the solution of differential equations, there are other important numerical methods that are used by different researchers but are not discussed here, which include the finite difference and boundary element methods (computer codes for learning can also be obtained from the author). Differential equations rely on the Taylor's series, and the derivatives in the differential equation can be replaced with finite difference approximations on a discretized domain. This will result in a system of algebraic equations that can be solved implicitly or explicitly. There are various ways to form the derivatives, and the most common methods are the forward difference, backward difference and the central difference schemes. While the finite difference methods may be more suitable for different types of differential equations, this method is less convenient to deal with irregular boundary conditions as compared with the finite element method. For highly irregular domain where it is not easy to form a nice discretization, the finite element method will also be much easier and natural to deal with for such condition. In this respect, it is not surprising that many engineering programs are written by the use of the finite element method than the finite difference method.
The boundary element method (BEM) is another numerical method for solving linear partial differential equations which can be formulated as integral equations. The boundary element method uses the given boundary conditions to fit boundary values into the integral equation. In the post-processing stage, the integral equation will be used to calculate the solution directly at any given point inside the solution domain numerically. BEM is applied to problems for which Green's functions can be calculated, thus this method is initially designed for problems in linear homogeneous media. The dimension of the problem will then be reduced by one. For example, two-dimensional problem will be effectively reduced to one-dimensional problem along the boundary, and this will greatly improve the efficiency of computation. The requirement from the boundary element method imposes considerable restrictions on the range and generality of problems to which the boundary element method can usefully be applied. There are some new developments to the boundary element method so that it can be used for non-linear problem or problems with several major materials (problems with random distribution of material properties are still not applicable). The fundamental solutions are often difficult to integrate. One important property of boundary element analysis is the solution of a fully populated matrix as compared with that in the finite element/difference method. For complicated problems, the boundary element will lose its advantage as compared with other numerical methods. Due to the various limitations, there are only limited boundary element programs available to the researchers. Interested readers can consult the works of Banerjee [1], Brebbia et al. [3] and Trevelyan [36]. It appears that there are less interest in the use and development of the boundary element method in the recent years, due to the various limitations of this method in general non-linear non-homogeneous problem.
In history, various techniques have been developed for ordinary differential equations and partial differential equations under different boundary conditions. While these tricks appear to be elegant, they are not readily adopted for normal engineering use due to various limitations. Being an engineer, the author seldom adopted the methods as outlined in this chapter in actual applications (but do adopt for teaching), except the numerical methods as outlined in this chapter. At present, there are many proprietary or open source finite elements or distinct element codes being used for many complicated real problems. The computer codes (usually in Fortran or C) are usually difficult to be read (if available), and the computer codes for all the partial differential forms (including some extended formats) that have been discussed in this chapter can be readily available from the author for learning purposes. There are also very powerful and general finite element tools or differential equations solver such as FreeFem++, Comsol, Matlab, Mathematica, Maple and Maxima which are used by many scientists and engineers [39, 40]. The use of parallel computing is also strongly influenced by the needs to solve complicated partial differential equations over large solution domain.
© 2017 The Author(s). Licensee IntechOpen. This chapter is distributed under the terms of the Creative Commons Attribution 3.0 License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
How to cite and reference
chapter statistics
6267 total chapter downloads
4 Crossref citations
More statistics for editors and authors
Login to your personal dashboard for more detailed statistics on your publications.
Access personal reporting
Related Content
This Book
Next chapter
On Nonoscillatory Solutions of Two-Dimensional Nonlinear Dynamical Systems
By Elvan Akın and Özkan Öztürk
Related Book
First chapter
Appell-Gibbs Approach in Dynamics of Non-Holonomic Systems
By Jiří Náprstek and Cyril Fischer
We are IntechOpen, the world's leading publisher of Open Access books. Built by scientists, for scientists. Our readership spans scientists, professors, researchers, librarians, and students, as well as business professionals. We share our knowledge and peer-reveiwed research papers with libraries, scientific and engineering societies, and also work with corporate R&D departments and government entities.
More About Us
Find General Solution of Pde With Bon Condition in Maple
Source: https://www.intechopen.com/chapters/54366
0 Response to "Find General Solution of Pde With Bon Condition in Maple"
Post a Comment